Dato:
25-04-2013
Varighed:
Fælles lab: 3 timer
Blog: 3 timer
Deltagere:
Steffen Høi
Nikolaj Mols Hansen
Martin Vang
Ulrik Sahl Lystbæk
Nikolaj Mols Hansen
Martin Vang
Ulrik Sahl Lystbæk
Status
Vi har monteret en marker på vores LEGO-robot og eksperimenteret med NXT motorernes tacho-counter og navigationssystemet i leJOS.
Mål
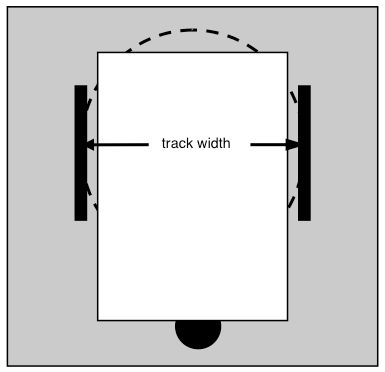
Målet for denne laboratoriesession er at bruge NXT motorernes tacho-counter til at holde rede på positionen og retningen af LEGO-bilen med såkaldt differential drive, hvor to motorer bliver brugt uafhængigt af hinanden til at flytte og styre bilen, som vist på figur 11.
Plan
- Konstruere en LEGO-robot med en marker monteret, så den kan markere LEGO-bilens bevægelse.
- Udarbejdelse af opgaverne for "Week 10 - Navigation and Map Building".
- Udarbejdelse af blogindlæg for denne laboratoriesession2.
Opgaver
Navigation
For at holde det simpelt valgte vi at udbygge vores LEGO-robot med muligheden for at holde en marker, som Maja Mataric3 beskriver. Til at holde markeren har vi fjernet sensoren forrest på LEGO-robotten og monteret to hjul, der kan holde fast om markeren.

Vores første kørsel resulterede i, at robotten kørte ud over kanten på tavlen, som vi havde robotten til at køre på. Derfor forkortede vi alle
distancer i koden til en fjerdedel. Nedenstående video viser robotten på dens
anden kørsel fra samme startpunkt.
Nedenunder ses slutresultatet af kørslen fra videoen.


Som det fremgår tydeligt, ligger de to streger ikke helt oven
i hinanden. Dette kan skyldes unøjagtighed i, hvordan vi har placeret robotten
imellem de to test kørsler. På billedet fremgår det, at forskellen imellem
de to streger vokser, specielt når robotten roterer, som Brian Bagnall4 også pointerer mht. til hans Blightbot . For at teste denne påstand
har vi opbygget en ny teststub i koden, hvor vi forsøger at rotere mest muligt
og derefter sammenligne robottens endelige position.
navigator.goTo(0,
-1);
navigator.goTo(0,
0);
navigator.goTo(0,
-1);
navigator.goTo(0,
0);
navigator.goTo(0,
-1);
navigator.goTo(0,
0);
navigator.goTo(25f,
25f);
Thread.sleep(12000);
Billedet viser to testkørsler med den nye teststub.


Den grønne marker er brugt til at lave referencepunkter for at placere
robotten ens under hver testkørsel. Den blå og den røde marker ligger meget
tæt på hinanden og afviger kun lidt. Afvigelsen vil dog være noget større på en
større skala, men de forskellige tests viste at afvigelsen var meget ens, og
derfor mener vi, at vores robot kunne klare opgaven ret præcist.
Navigation while avoiding objects
For at få LEGO-bilen til at undgå objekter foran den, kunne man montere en ultrasonic-sensor. Når man skal undgå objekter samtidig med at bruge Navigationen, kan man tjekke for objekter i en særskilt tråd. Det er ikke nødvendigt at starte en tråd til Navigationen, da den automatisk kører i en særskilt tråd. Tråden der bruges til at opdage objekter med kan stoppe Navigationen, når den ser et objekt og beregne en ny rute, som der skal navigeres efter.
Improved navigation
For at navigere korrekt beregnes der i Java Robotics Tutorials5 en fejl ud fra, hvor meget et hjul burde have kørt i forhold til, hvad det rent faktisk har kørt. Fejlen bruges til at udligne retningen ved at give mere styrke til motoren, der er bagud og mindre styrke til motoren som er foran. På denne måde vil robotten komme til at oscillere. Det er en proportional kontrol uden integral og derivate, så det vil være svært at mindske oscilleringen.
Thomas Hellstrom6 beskriver, hvorledes det er muligt at lave præcise svingninger. Dog kan formlen også
bruges ift. at køre ligeud, da man så blot betragter afvigelsen fra ikke at have svinget. Eftersom denne model ikke bruger
akkumulering af afvigelse til at korrigere for fejl, er den mere præcis. Når afvigelsen opstår, bliver der med det samme reguleret
på hastigheden af hjulene. Dette betyder, at modellen faktisk
forsøger at lave et estimat af hvilken kraft, der skal på motorerne
for at lave et givet sving, og undervejs i svinget korrigerer
hastigheden af hjulene, så svinget bliver korrekt. Altså, modellen
benytter viden om, hvor man skal hen til at lave en vurdering af,
hvordan der skal tilpasses, i stedet for at se på hvor vi er henne
lige nu, ift. hvor vi burde være henne lige nu.
Vi har også taget et kig på hvordan
Navigator og særligt TachoNavigator er implementeret i leJOS. Efter at have undersøgt det lidt nærmere kom vi frem til, at ArcAlgorithms7 bliver brugt til selve
beregningen af en Path frem til en destination. Præcis hvad der sker
i denne klasse er dog noget kaotisk, ikke mindst fordi der er talrige
kode-kommentarer om ting, der enten ikke fungerer helt efter
hensigten, ting der lige er blevet rettet, eller forslag til hvordan
koden kan skrives om, så den kan læses af andre.
Herunder er vores bud på hvad klassen
gør:

Konklusion
Denne uge har vi eksperimenteret med at bruge NXT motorernes tacho-counter til at holde rede på positionen og retningen af LEGO-bilen med såkaldt differential drive. Vi har bygget vores LEGO-robot om, så den nu har en marker monteret, så vi kan følge bilens bevægelse. Vi har fået bilen til at flytte sig mellem forskellige positioner og set, at den er god til at måle distancer, men at den ikke roterer helt ens hver gang. Vi har desuden overvejet, hvordan man kan få LEGO-robotten til at undgå objekter samtidig med at bruge leJOS navigationssystemet. Desuden har vi kigget på de to artikler; Java Robotics Tutorial og Thomas Hellstrom, og vurderet at den model Thomas Hellstrom beskriver, er den mest præcise. Vi har også kigget på, hvordan leJOS i ArcAlgorithms opdaterer positionen og retningen, men vi har haft svært ved helt præcist at se, hvordan leJOS i ArcAlgorithms, har implementeret dette, så det har været vanskeligt for os at finde frem til, om vi kan bruge Thomas Hellstroms noter til at forbedre dette.
____________________________________________________________________________________________________________
1. http://legolab.cs.au.dk/DigitalControl.dir/NXT/pictures.dir/DiffCar.jpg
2. http://legolab.cs.au.dk/DigitalControl.dir/NXT/Lesson9.dir/Lesson.html
3. Brian Bagnall, Maximum Lego NXTBuilding Robots with Java Brains, Chapter 12, Localization, p.297 - p.298.
4. Maja J Mataric, Integration of Representation Into Goal-Driven Behavior-Based Robots, in IEEE Transactions on Robotics and Automation, 8(3), Jun 1992, 304-312.
5. Java Robotics Tutorials, Enabling Your Robot to Keep Track of its Position.
6. Thomas Hellstrom, Foreward Kinematics for the Khepera Robot
7. https://sites.google.com/site/digikaison/ArcAlgorithms.java







{kind=link}
{kind=link}